This video contains proprietary information and cannot be shared publicly at this time.
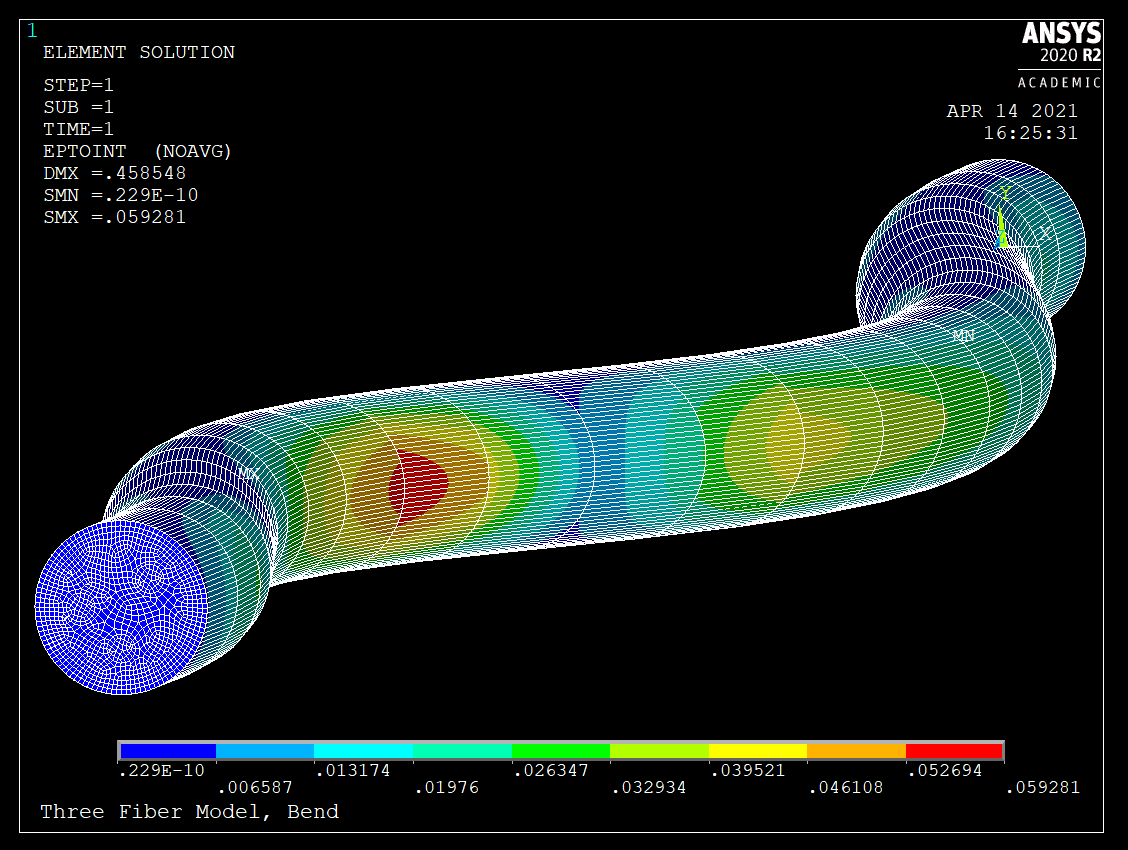
Figure 1
Team 2
Team Members |
Faculty Advisor |
Joshua Relucio |
Serge Nakhmanson Sponsor General Dynamics Electric Boat |
sponsored by
![]()
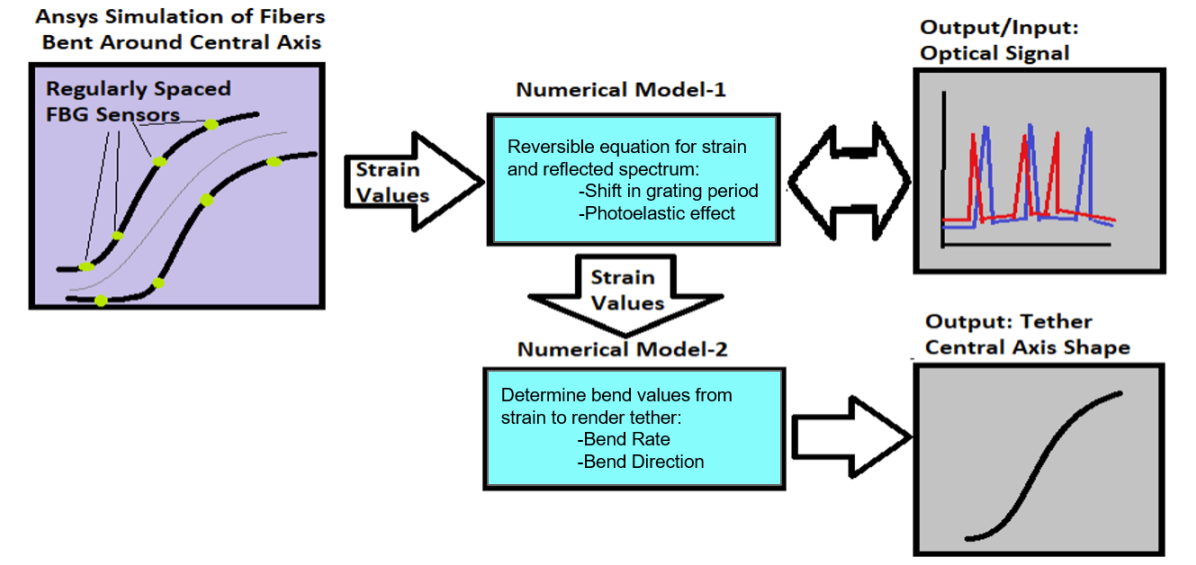
Tether management is of great importance with regards to unmanned undersea vehicles (UUVs). The role of the tether is to communicate data to and from the UUV and any extreme bending of the tether can damage the embedded optical fibers which in turn will produce a negative effect on its optical properties. This project concerns the creation and modeling of an optical fiber-based system where the fibers are the positioning sensors providing a lightweight and low-cost sensing solution to monitor the shape of the tether. Our primary objective is to create an optimized fiber layout (cross-sectional) that allows for the overall shape of the tether to be solved for using strain values provided by ANSYS simulations. This is done through the concept of Fiber Bragg Gratings (FBG), where an applied strain to an FBG will result in a shift in Bragg wavelength. By leveraging the cross-sectional layout of the fibers and reading the Bragg wavelength at each "sensor", one is able to decipher the shape of the tether.
