This video contains proprietary information and cannot be shared publicly at this time.
Figure 1

Figure 2
Team 06
Team Members |
Faculty Advisor |
Michael Fydenkevez |
Chengyu Cao Sponsor Aquiline Drones |
sponsored by
![]()
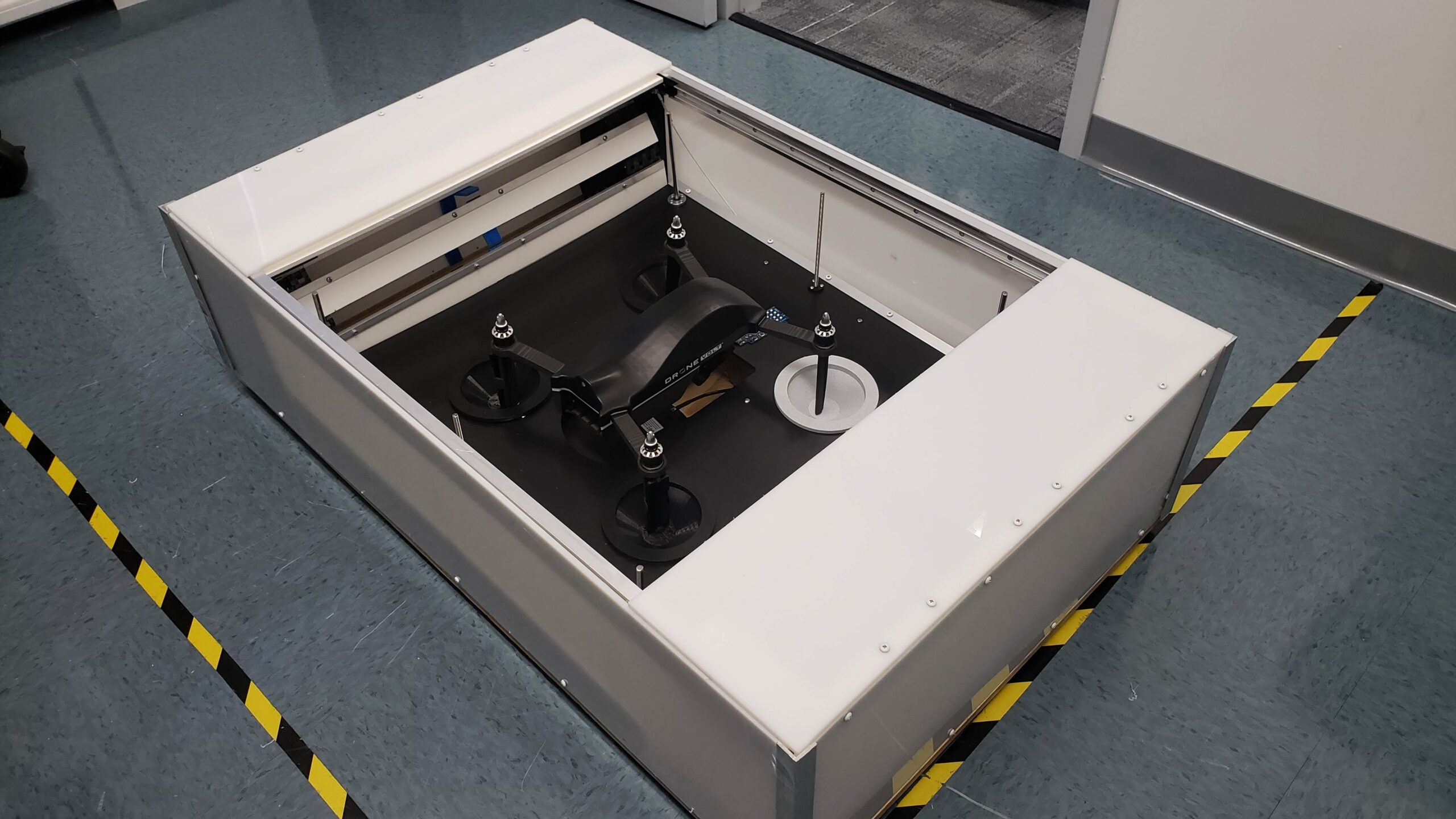
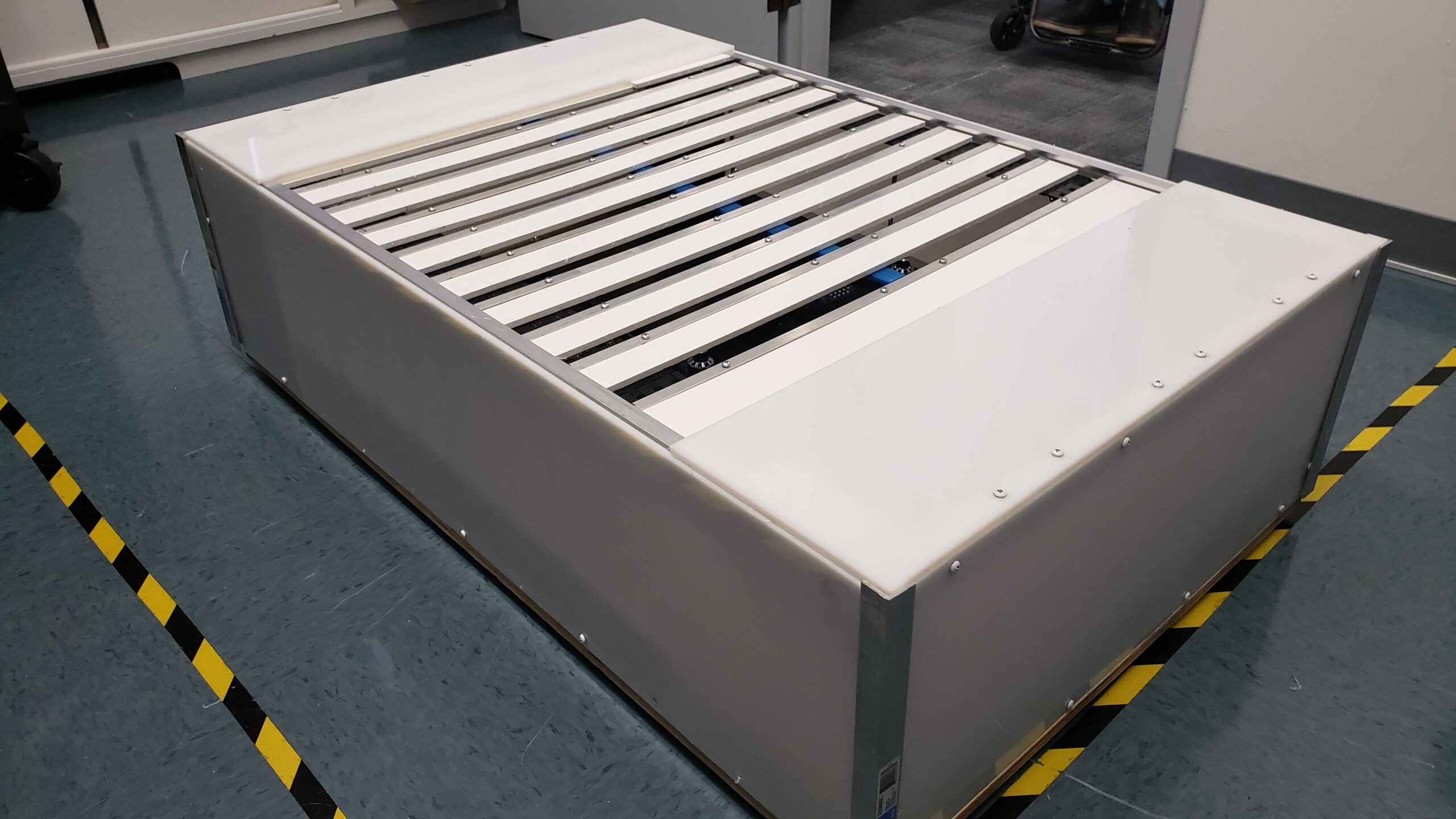
The goal of this project is to develop a compact, drone landing system for Aquiline Drones. This is intended to be a proof of concept project designed around a specific drone model (Drone Volt’s Hercules 2) that can be adapted for use with other drones. This landing system will enable drones to autonomously land on a platform once it comes into range, and then contain the drone until it is needed for its next mission. Drones outfitted with an IR Lock sensor will lock onto a beacon located on the landing platform, initiating the landing sequence. Upon landing, the platform will lower itself with the drone into the landing system where the drone will be magnetically secured to the platform to prevent additional movement. Wireless charging coils integrated into the drone allow the drone to begin wirelessly charging its onboard battery through the integrated charging system within the landing system. Once the drone has been completely lowered, an internally contained garage door style mechanism will close above, sealing the inside of the landing system from the outside environment.
