Figure 1
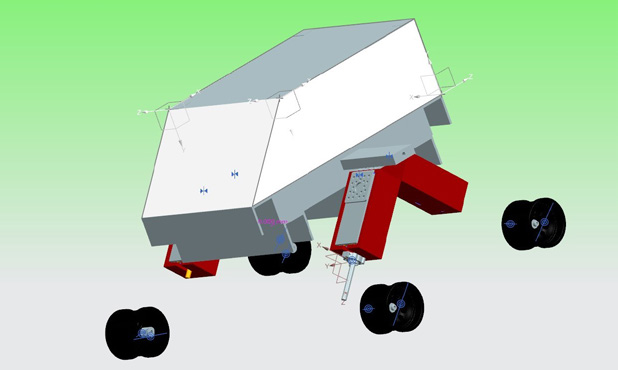
Figure 2
Mechanical Engineering
Team 2
Team Members |
Faculty Advisor |
Alicia Jackson |
Chengyu Cao Sponsor Agrivolution LLC |
sponsored by
![]()
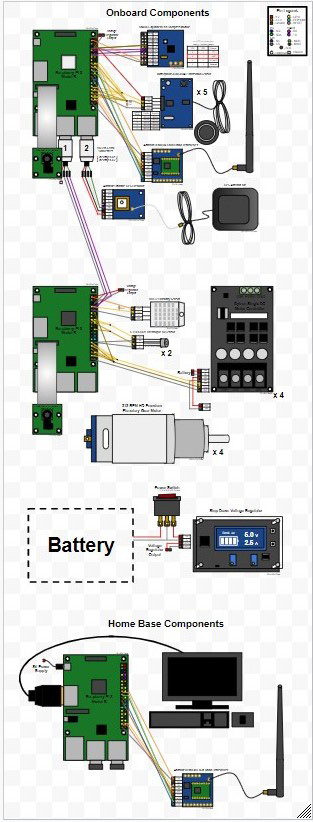
The farming population is aging and dwindling; yet farmers need to be more productive with fewer hands to feed nearly 10 billion people by 2050. The objective of this project is to design an agri-robot prototype intended to assist small- to mid-size farms with that can be autonomously deployed with GPS navigation in a field or greenhouse to monitor crop growth and health in order to assist the farmers with daily operation. The prototype uses ultrasonic sensors for object avoidance, and additionally has on-board sensors to measure temperature and humidity. Our design uses two high resolution cameras to process images to analyze crop health (or lack thereof) to a home base operated by the user. Our design fits into a niche in the agri-robotics industry by being able to measure crop health with a ground-level robot, that has a large operational range, and is affordable economically.
