
This video contains proprietary information and cannot be shared publicly at this time.
Figure 1
Team 41
Team Members |
Faculty Advisor |
Jason Thai (CSE) |
Phillip Bradford Sponsor Movia Robotics |
sponsored by
![]()
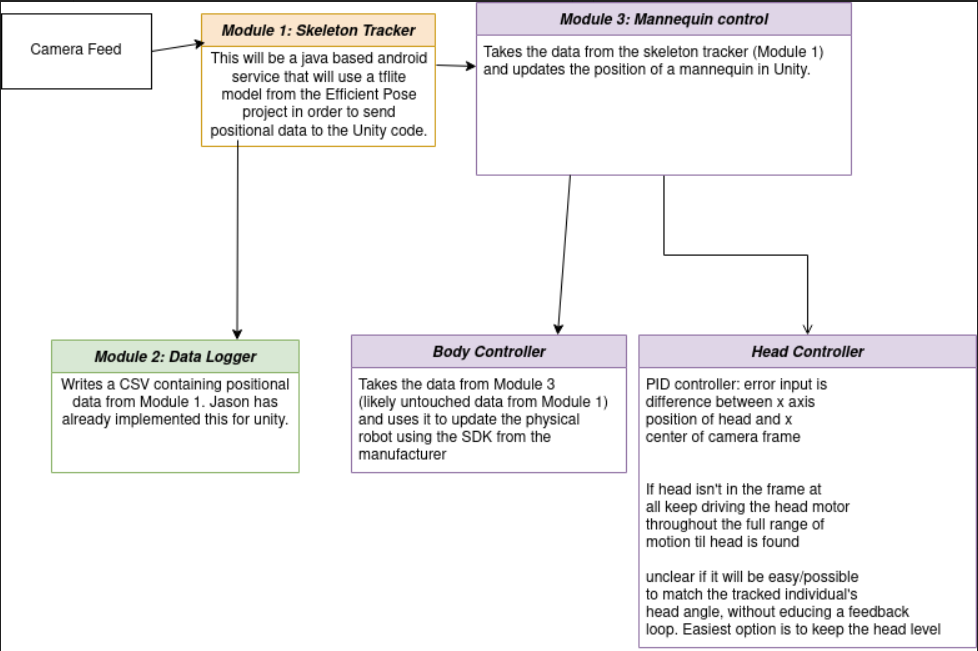
The main goal of this project was to design a posture detecting and replicating system that could be incorporated into a Kebbi robot. The system extracts body position, posture, and gestures using the Kebbi robot's built-in camera, then those features are processed using computer vision. After processing the robot's motors are driven to replicate the user's gestures and posture and the data frames are logged. The end goal was so users can educate and assist children using the Kebbi robot.
