Figure 1
Team 2107
Team Members |
Faculty Advisor |
Paul Simmerling |
Shalabh Gupta Sponsor Other |
sponsored by
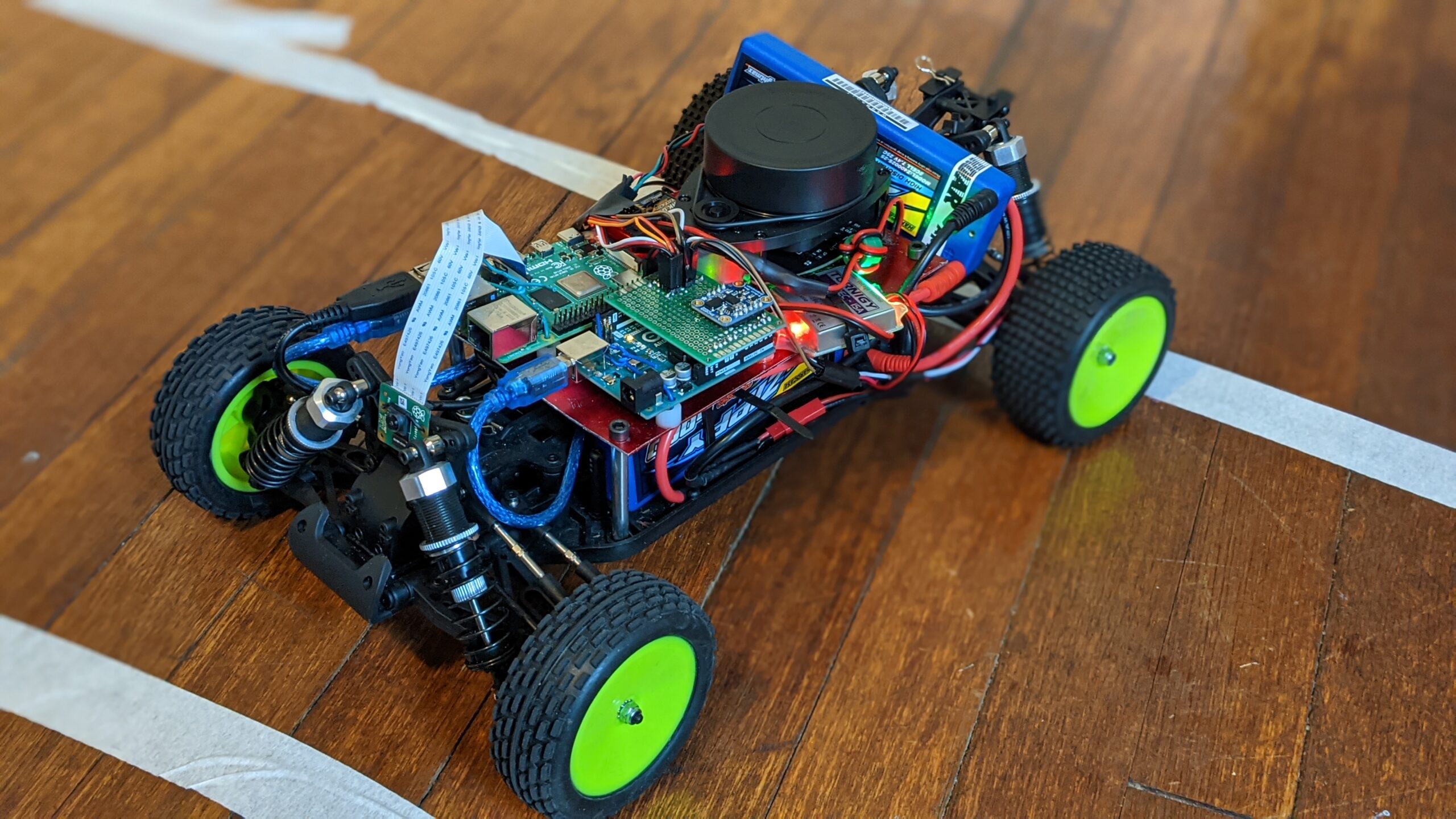
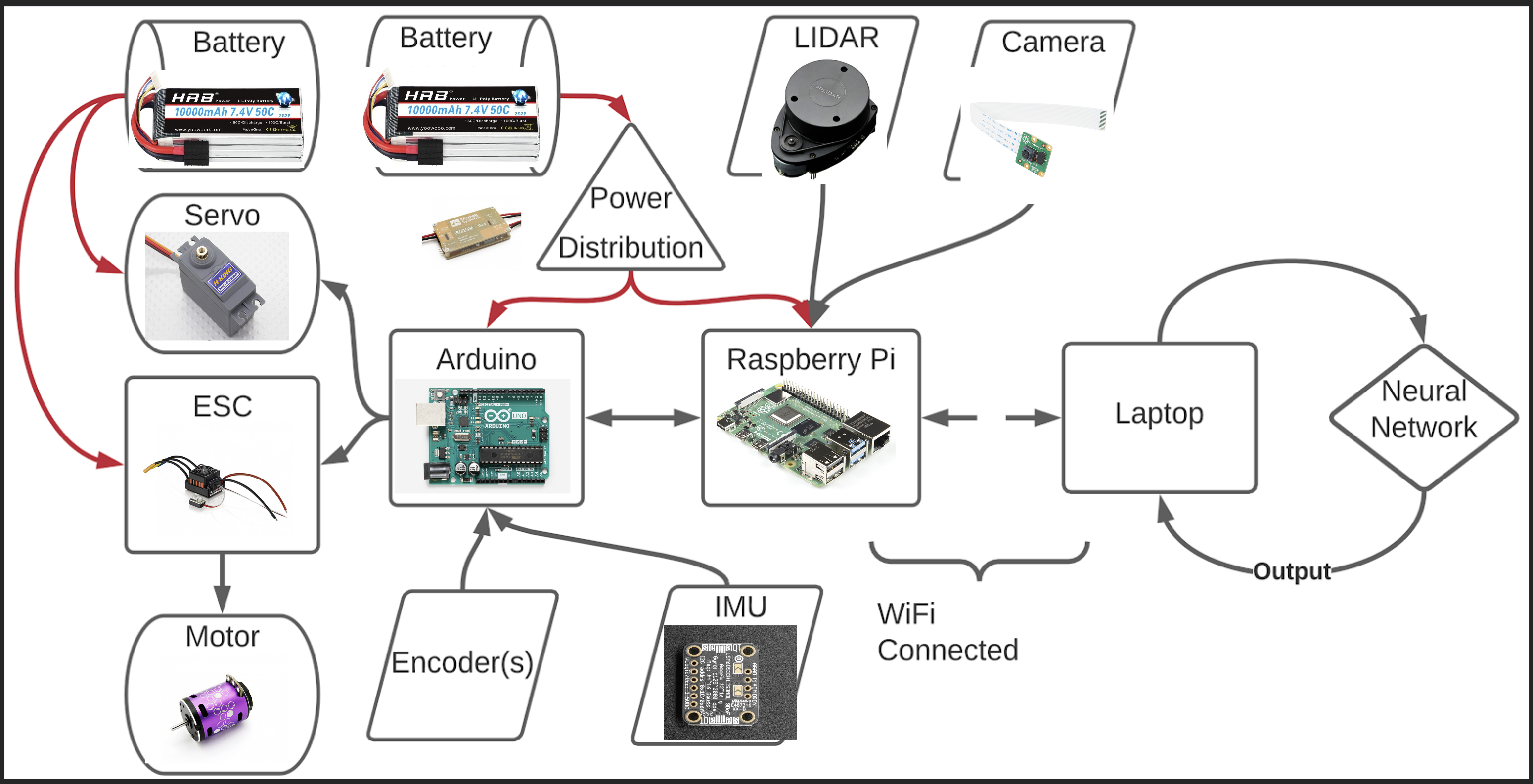
The goal of this project is to build a small-scale car setup employing a variety of different sensors like (depth/camera) to generate ground truth labels that will be used as training datasets for a vehicle maneuvering on a road. We will test and develop machine learning (specifically deep neural networks) that uses the sensor information to construct a vehicle motion in response to the sensor information. To accomplish this goal, a testbed was built that uses Robot Operating System (ROS) to control a sensor-suite capable of self-driving. This suite includes a camera, LIDAR, inertial measurement unit (IMU), and encoders. These sensors are connected to an Arduino/Raspberry Pi that is wifi connected to an external laptop which processes the neural network. This allows for two modes of operating: the training teleoperation mode, and the neural networking mode. In the training mode the robot is controlled by a standard gamepad controller and the data recorded by the car is recorded on the laptop. In the neural network mode, the vehicle drives around the track autonomously.
