
Figure 1

Figure 2
Team 24
Team Members |
Faculty Advisor |
Harrison Cao |
Horea Ilies Sponsor Other |
sponsored by

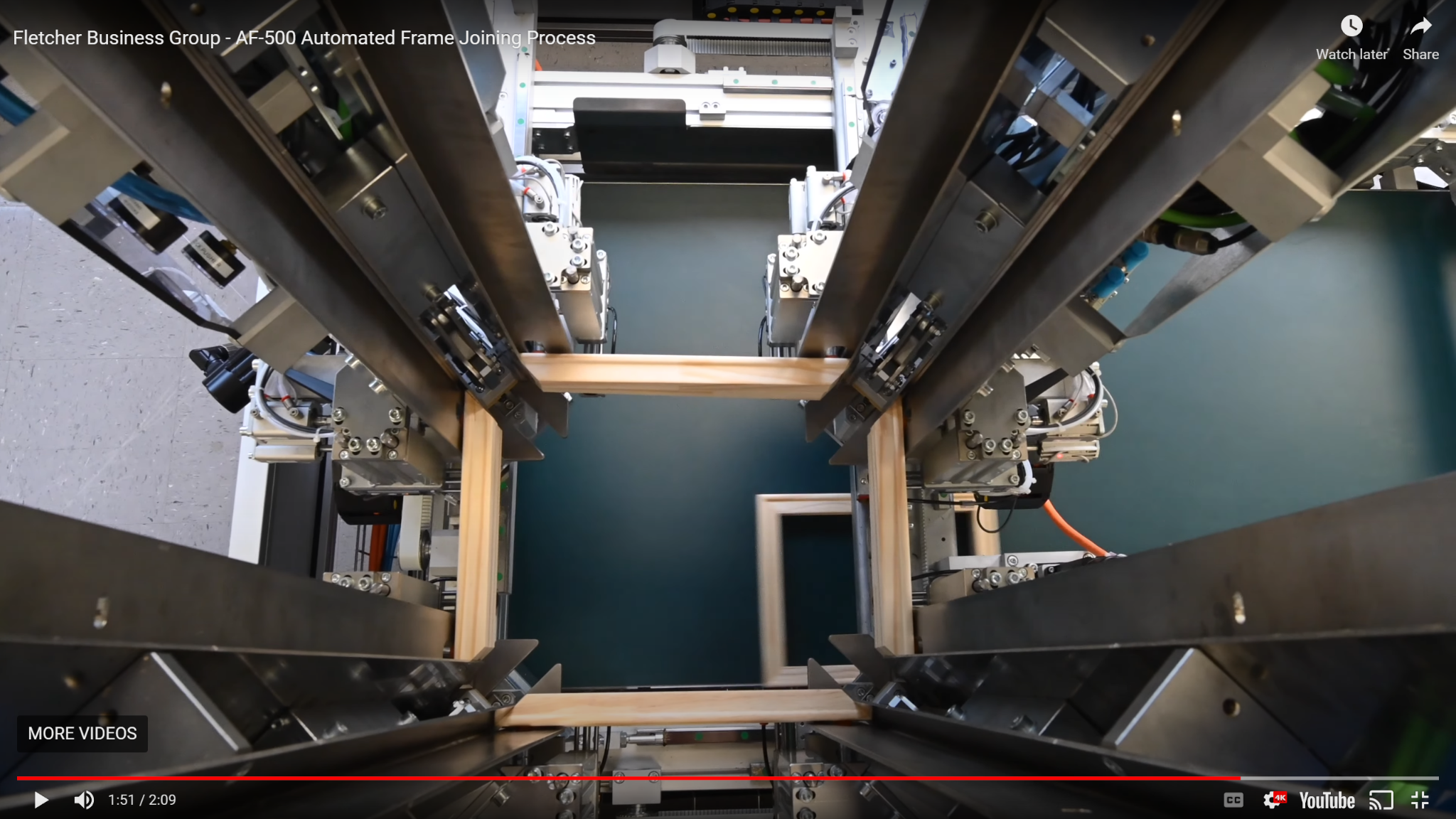
Redesign Auto Frame Robot to Improve Clamping Stability
The objective of this report is to develop an alternative clamping mechanism and custom clamping foot for Fletcher-Terry’s automated framing robot to improve joining at the corners of wooden picture frames. Fletcher-Terry sells the AF500, a state-of-the-art automated framing robot that can produce a wooden picture frame of any size in under eight seconds. The AF500 was designed for high volume, automatic frame joining. It outputs the same number of frames as eight manual joiners while only requiring one operator to load the frame edges into a vertical feeder. Currently, the robot automatically positions the four sides of the frame using pneumatic locators. It then clamps down on top of the frame corners with flat plastic feet and rapidly inserts V-Nails in multiple locations along the corner specified by the operator on the control panel. Currently, for each nail driven into the frame corners, the robot needs to clamp and unclamp the frame because the clamp and the nailer are coupled. This constant motion, accompanied by the rigid clamp feet, creates gaps in the corners of the frame when the nails are driven. This problem is exacerbated with more ornate frames that have features causing the face of the frame to be non-flat because now the flat clamp foot is applying uneven pressure upon a curved surface. The new design must maintain the current manufacturing throughput and clamp a variety of frame shapes.
Our team collaborated with Management & Engineering for Manufacturing 11 on this project.
