
Figure 1
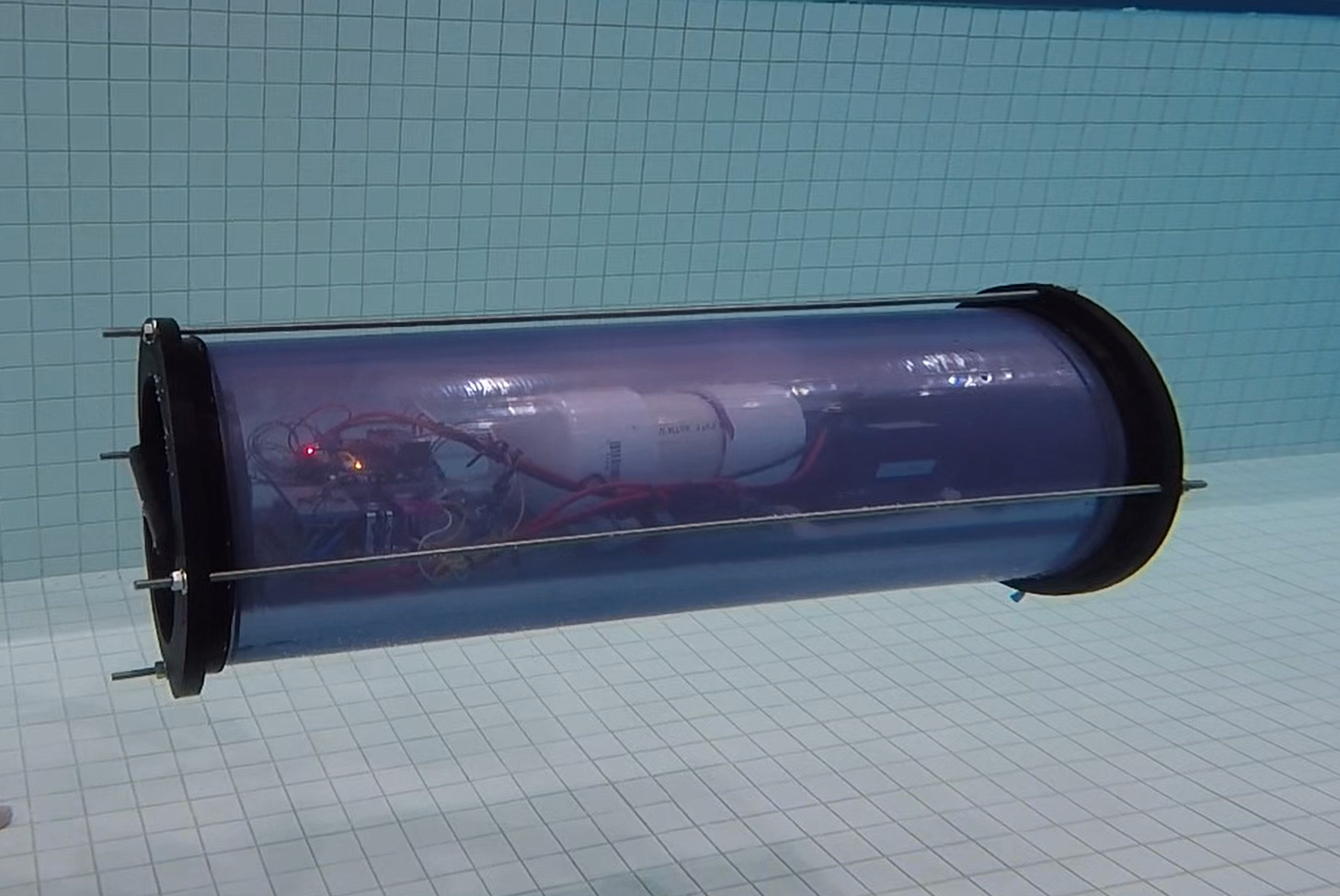
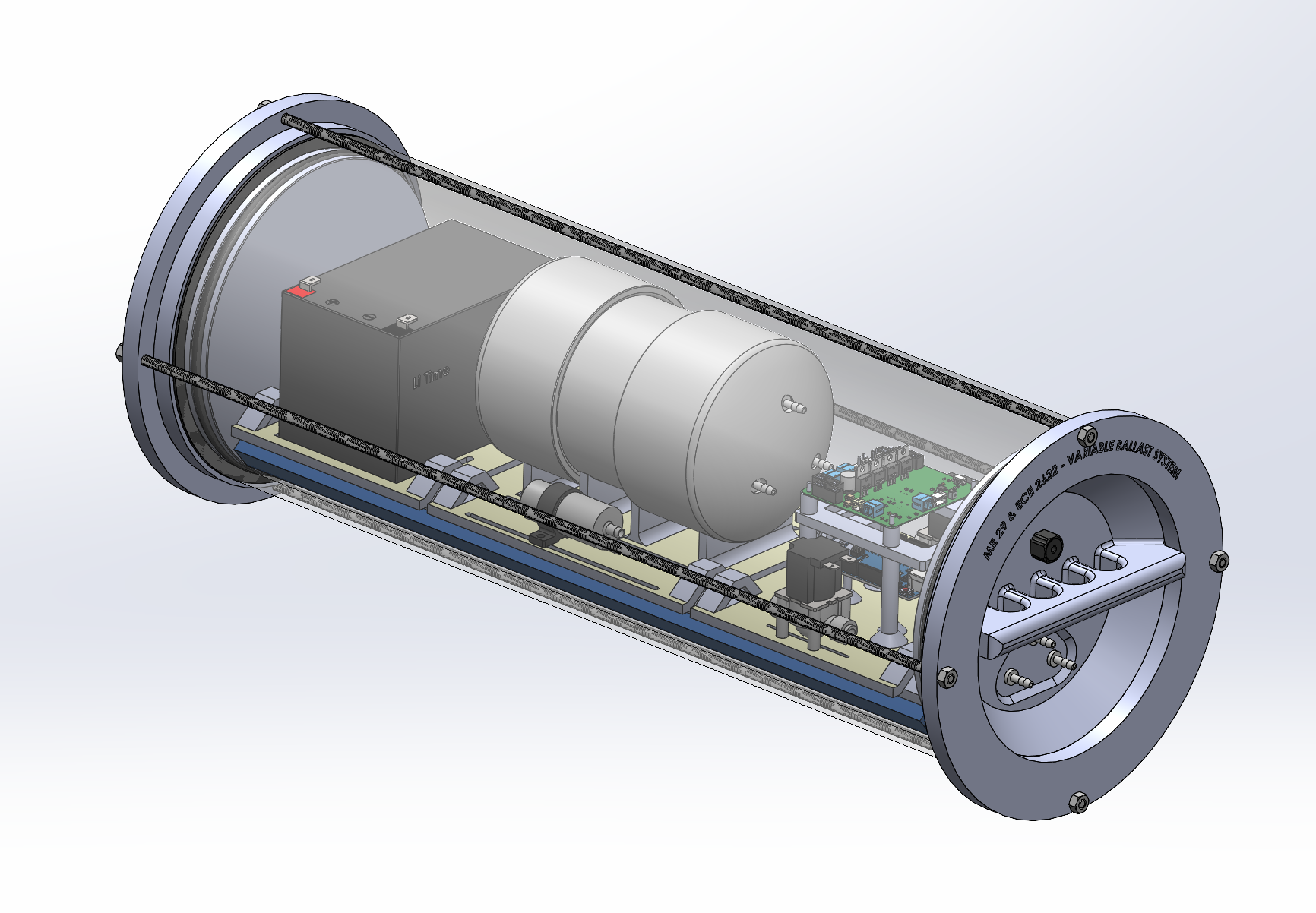
Figure 2
Team 29
Team Members |
Faculty Advisor |
Wesley Frank |
Dr. Jason Lee Sponsor NUWC |
sponsored by
![]()
Scalable Unmanned Underwater Vehicle Variable Ballast System
This project focuses on the design and validation of a variable ballast system (VBS) that can be retrofitted onto a commercially available unmanned underwater vehicle (UUV), specifically the REMUS 300 platform used by the Naval Undersea Warfare Center. The goal of the system is to enable two key capabilities: precise depth control through buoyancy adjustment (trimming) and controlled seafloor landing and resurfacing (bottoming). Following a concept selection process that evaluated multiple ballast system designs against criteria such as performance, reliability, efficiency, and scalability, a pumped-water approach was chosen as the most effective solution. The project then progressed into the design and fabrication of a scalable prototype to validate this concept under real-world conditions. The prototype system integrates a pressure vessel, ballast tank, pumps, solenoid valves, sensors, and a microcontroller-based control system to replicate full-scale operation. Analytical modeling was combined with experimental testing, including buoyancy and trim analysis, vacuum testing for structural integrity, and in-water performance evaluations. Testing demonstrated that the system can successfully control buoyancy, achieve stable ascent and descent, perform bottoming maneuvers, and maintain near-neutral buoyancy for trim. Differences between predicted and observed behavior also provided valuable insight into real-world system dynamics. Overall, this project establishes the feasibility of a pumped-water variable ballast system and provides a strong foundation for future full-scale implementation on operational underwater vehicles.
Our team collaborated with Electrical and Computer Engineering 22 on this project.
