
This video contains proprietary information and cannot be shared publicly at this time.
Figure 1

Figure 2
Electrical and Computer Engineering
Team 2026
Team Members |
Faculty Advisor |
James Kuveke |
Shalabh Gupta Sponsor ThayerMahan |
sponsored by
![]()
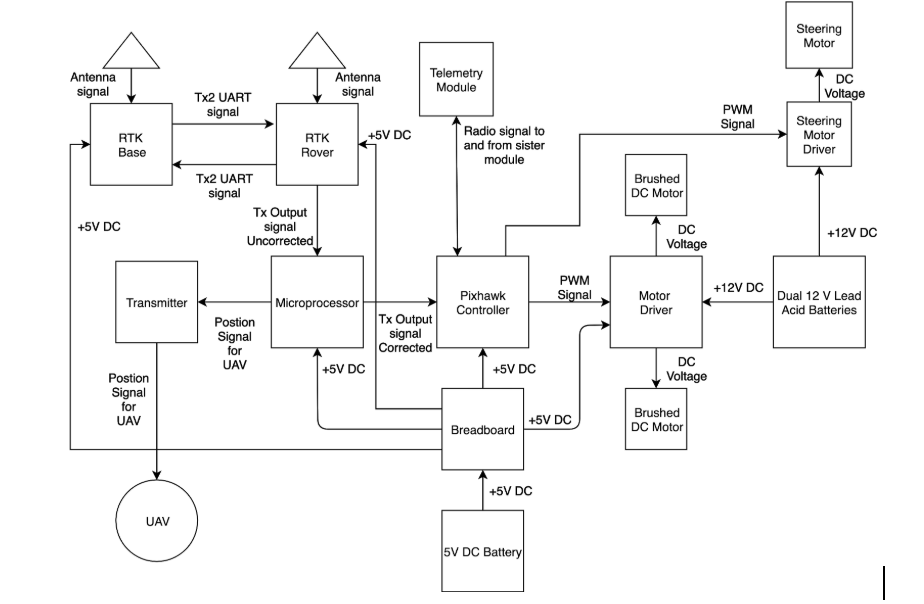
ThayerMahan, a maritime surveillance company, works with the United States government to survey and monitor our ocean borders. ThayerMahan has tasked our team, in conjunction with a mechanical engineering team, with the development of an unmanned ground vehicle to simulate the landing of an unmanned air vehicle on an unmanned boat (the ground vehicle will be replaced by a boat in practical use). The vehicle will be able to move towards set way points through gps, the use of two electric motors and the function of skid steering to change direction. To achieve autonomous control and facilitate an accurate landing, the UGV will use RTK GPS technology, which provides extremely accurate coordinates, to transmit its position to the UAV. Once the UAV has received the position of the UGV, it will locate the ground vehicle, and land on a landing platform.
