
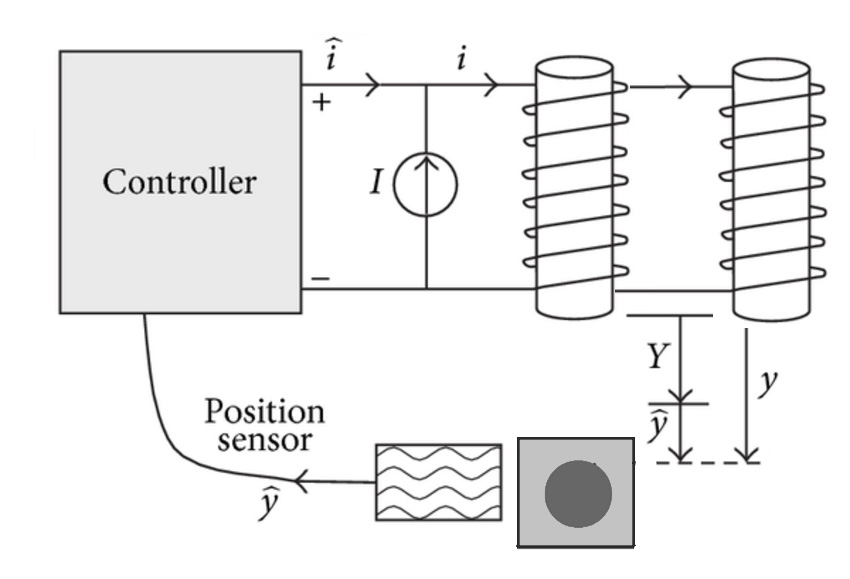
Figure 1
Electrical and Computer Engineering
Team 2006
Team Members |
Faculty Advisor |
Lucas McPhee |
Liang Zhang Sponsor Electrical and Computer Engineering |
sponsored by
A widely used lab-scale control theory demonstration is the magnetic levitation system which uses an electromagnet to lift a steel ball airborne compensating for the downward force of gravity. The magnetic steel ball levitation demo illustrates the idea of real-world applications such as Maglev trains. The current steel ball levitation demo used by the ECE department requires a connection with a computer running MATLAB/Simulink and cannot perform any lateral movement of the elevated object. Thus, the goal of this project is to implement a standalone steel ball levitation demo that has the ability to move laterally. The device will be implemented using inverted electromagnets to levitate steel ball. Distance sensors are used measure the desired distance between the ball and magnet constantly. This distance is sent to a microcontroller which will calculate the amount of current supplied to the electromagnets to levitate the ball at the desired height, depending on its current height. Power electronics are used so that this demo can be powered through a standard 120 V power outlet.
