
This video contains proprietary information and cannot be shared publicly at this time.
Figure 1

Figure 2
Team 18
Team Members |
Faculty Advisor |
Sharanya Ganesh |
Krystyna Gielo-Perczak Sponsor Other |
sponsored by
![]()
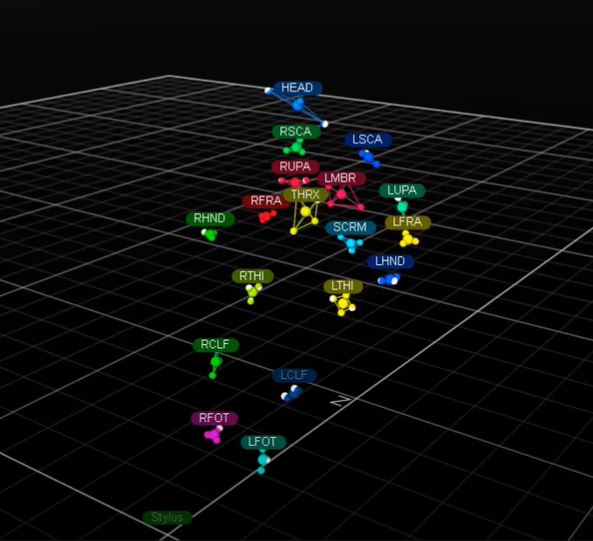
Lower-extremity exoskeletons provide patients the ability to regain motor control and muscle mass. Current exoskeleton designs provide powered assistance via actuators: heavy and expensive, yet necessary mechanical components that contribute to limited portability and accessibility of the device to the general population. The purpose of this study is to quantify the assistive ability of a lower-extremity exoskeleton design in aiding the sit-to-stand motion. Performance is measured by multiple testing systems synchronously gathering balance, muscle activation, and motion capture data. Readings from the AMTI AccuSway force platform and Delsys Trigno EMG sensors, alongside OptiTrack motion capture recordings, are used to generate C3D files of several dynamic trials of a subject performing the motion without provided assistance. The AnyBody Modeling System is used to optimize the locations of the subject’s joint axes, joint centers, and segment lengths as gauged by the motion capture system to generate kinematic joint angle data, ultimately providing a more accurate and subject-specific model. Subsequently, incorporating the synchronous muscle activity and force data enables an inverse dynamic analysis to be conducted, by which joint reaction forces and moments are calculated. Repeating the procedure with the subject actively wearing the exoskeleton allows for the device’s influence on these joint reactions, and thus the physical demand to surrounding muscles, to be quantitatively determined. A successful design will provide stability to a patient’s knees while assisting the patient in regaining muscular strength and motor control.
