Figure 1
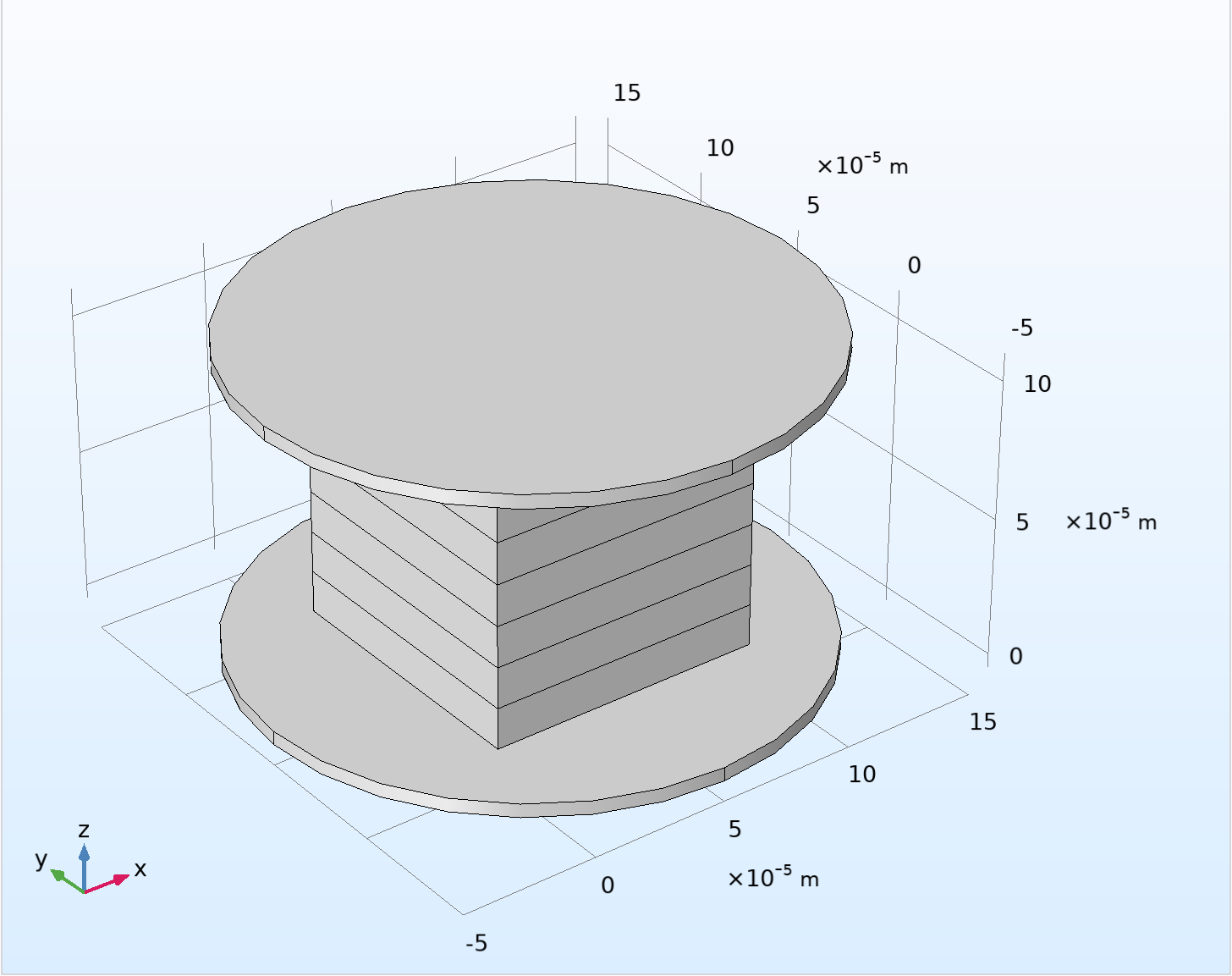
Figure 2
Team 2116
Team Members |
Faculty Advisor |
Zachary Adamson (EE) |
Dr. Yang Cao (EE) and Dr. Georgios Matheou (ME) Sponsor General Dynamics Electric Boat |
sponsored by
![]()
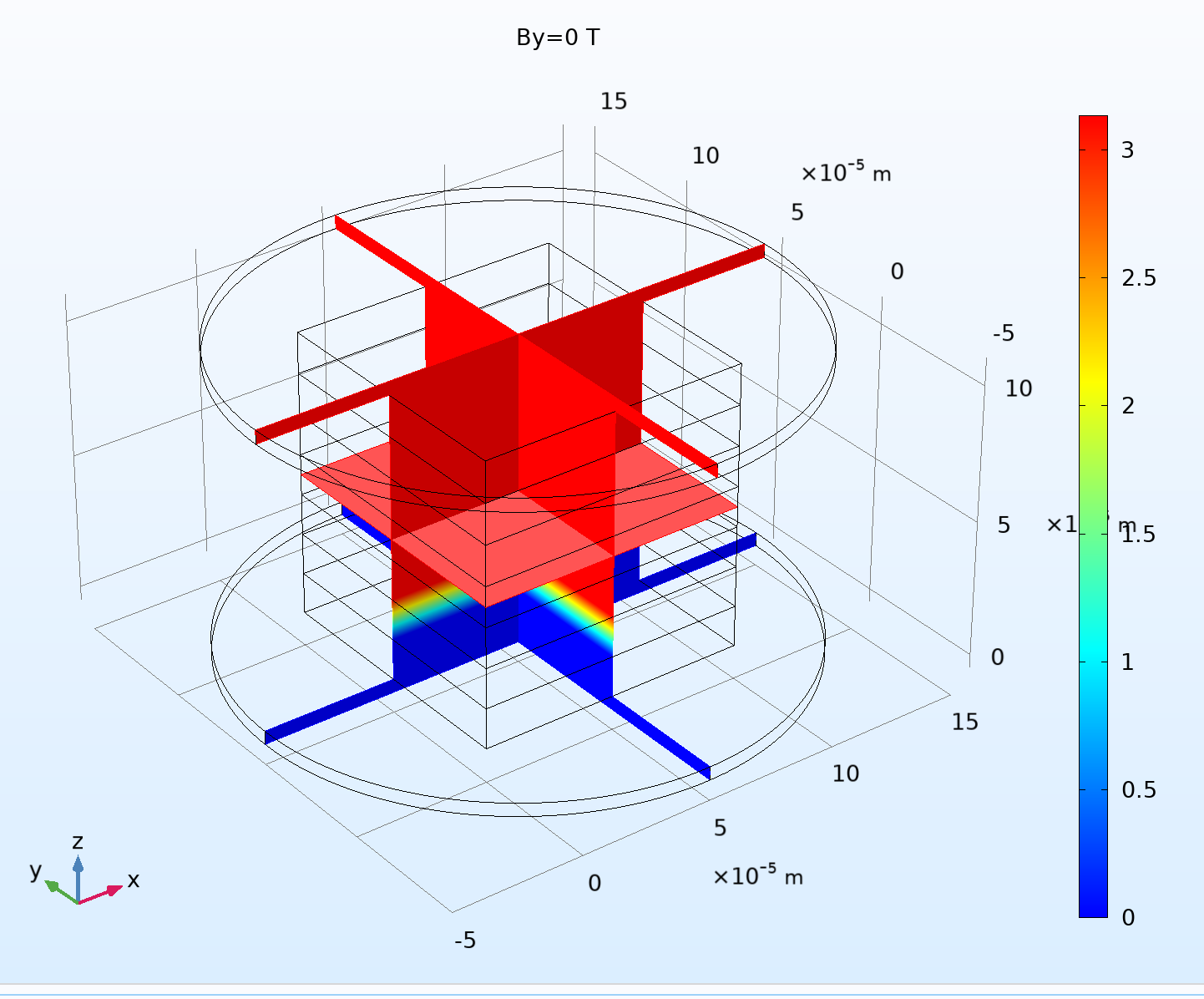
The main objective of this project is to design a precision MEMS (microelectromechanical) magnetometer for General Dynamics Electric Boat. By using MEMS, we can miniaturize the sensor, which will make it easier to deploy onto a PCB. This sensor could then be used on an autonomous vehicle to sense changes in the Earth’s magnetic field. The Earth’s magnetic field fluctuates around 36 microTesla, so Electric Boat gave us a target precision of 0.1 nanoTesla. There are many MEMS magnetometer types currently sold on the market, so we first had to determine the best solution for our project. After weighting all the potential options, we settled on designing a magnetoresistive magnetometer. This magnetometer works by changing resistance in the presence of a magnetic field. Running a current through the magnetometer generates a voltage, which changes due to the resistance change. To test a potential design, we simulated the performance and thermals of our design in COMSOL Multiphysics. We also designed a circuit diagram to interpret the outputs in voltage, from our magnetometer.
