Figure 1
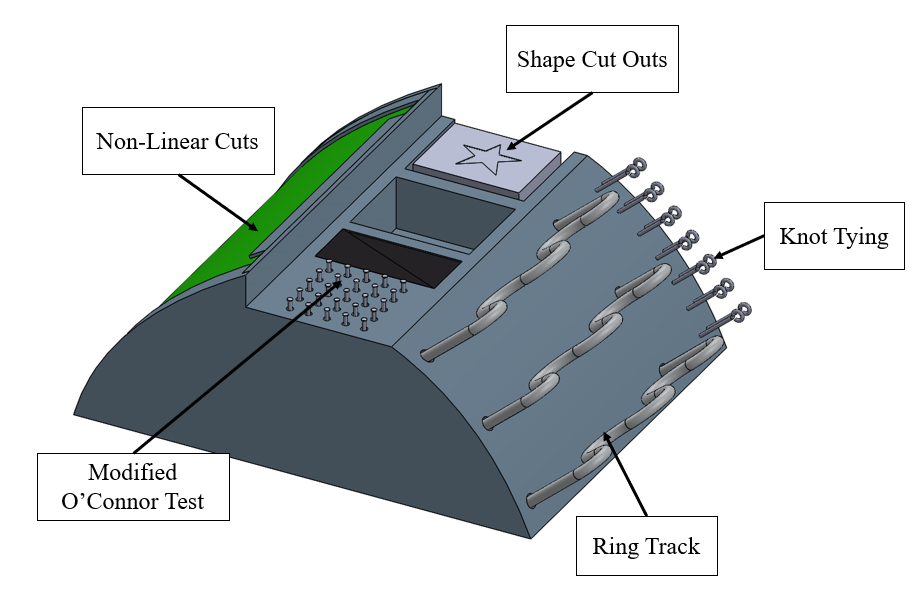
Figure 2
Team 34
Team Members |
Faculty Advisor |
Stephanie DeVita |
David M. Pierce Sponsor Medtronic |
sponsored by

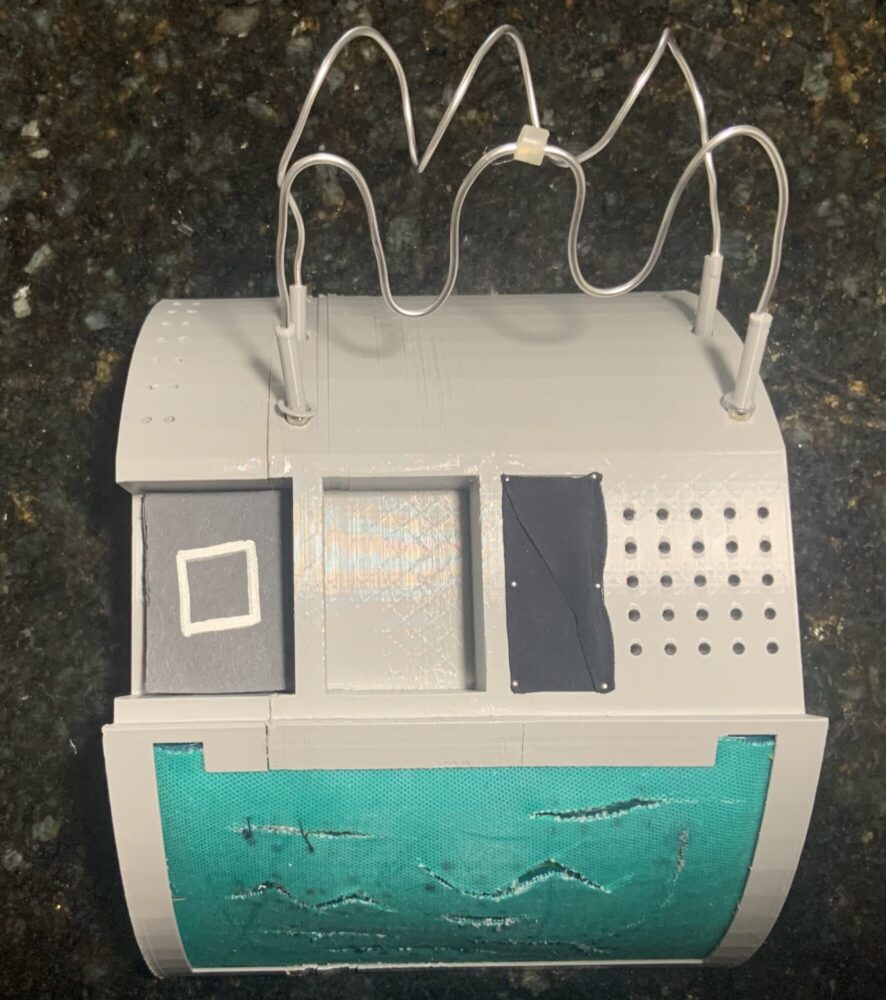
The objective of this project is to design and implement exercises into a new 3D simulated-use device to evaluate Medtronic’s Robotic Assisted Surgery (RAS) system. Medtronic is a global leader in medical technology, service, and solutions to aid in surgery and patient recovery. They will use this device internally, in a non-clinical setting, to collect feedback on the functionality of their RAS system. An RAS system has four arms, one of which is equipped with a camera and the remaining three which can be equipped with surgical tools. The exercises test essential RAS skills. These include proficiency in fourth arm control, camera movement and dexterity. Fourth arm control refers to the use of all tool-bearing arms. Camera movement is the ability to navigate with an endoscope, and dexterity refers to fine motor skills. Exercises also simulate specific surgical procedures and are designed to be repeatable for efficient testing and reusable to promote longevity of the device. The device consists of five exercises: Non-Linear Cuts, Knot Tying, Ring Track, Modified O’Connor Test, and Shape Cut-Outs. Non-Linear Cuts and Knot Tying simulate surgical procedures. Non-Linear Cuts simulates suturing by having the user stitch lacerations in synthetic skin. Knot Tying allows the user to practice surgical knots on eye-pins. In the Ring Track exercise, the user guides a ring along 3D tracks of varying difficulties. Fourth arm control is also tested in this exercise by having the user remove blockages along the route. The Modified O’Connor Test is a variant of a commonly administered surgical dexterity test. The user draws pins from a veiled chamber and places them into a grid of holes. In the Shape Cut-Out exercise, users cut out pre-defined shapes from card stock. We modeled the five exercises in CAD and integrated them into a 3D printed base that fits within Medtronic’s abdominal trainer. Our final design was submitted by Medtronic to be patented within the year.
