
Figure 1
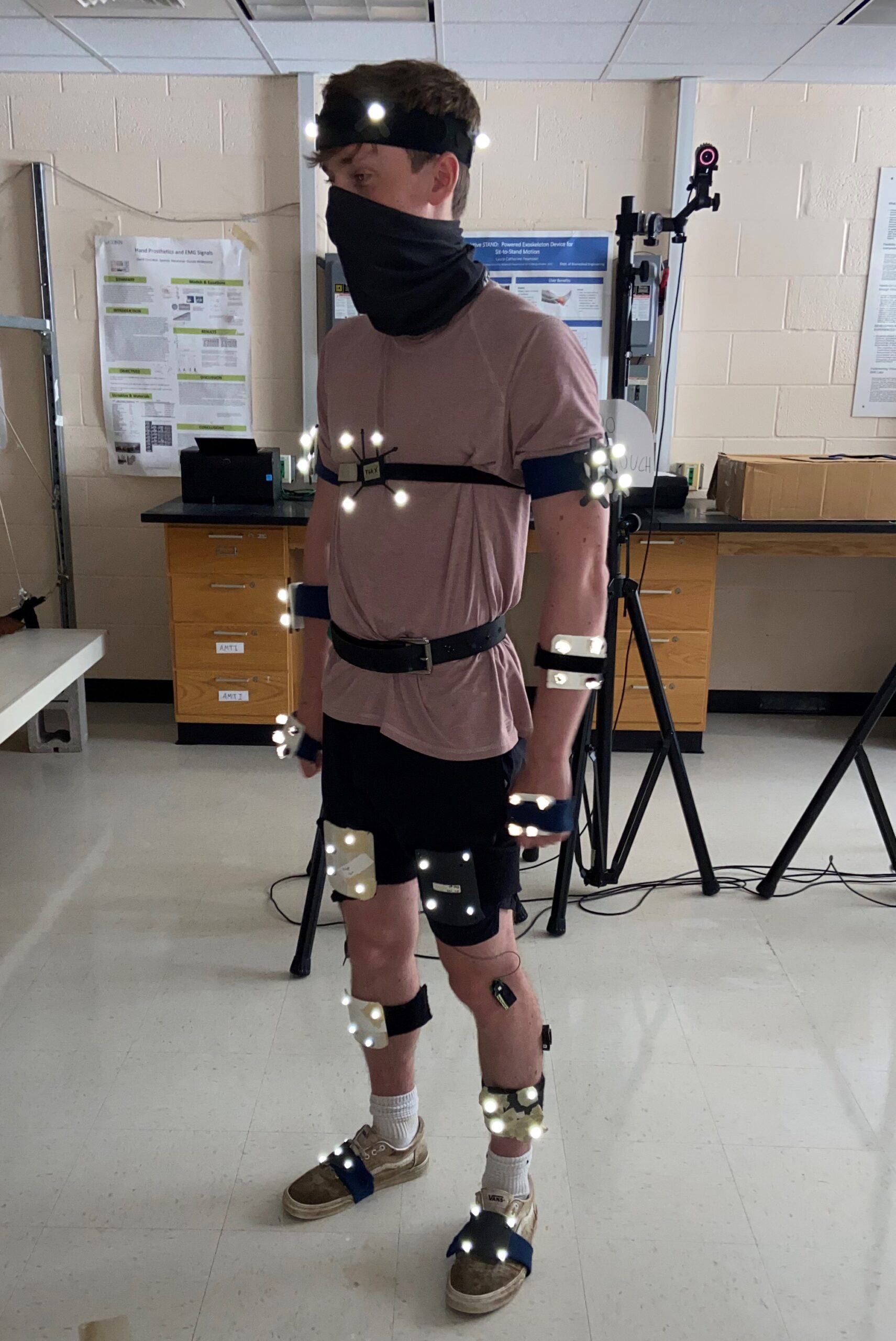
Figure 2
Team 15
Team Members |
Faculty Advisor |
George El-Haoui |
Dr. Krystyna Gielo-Perczak Sponsor UConn Biomedical Engineering Department |
sponsored by
![]()
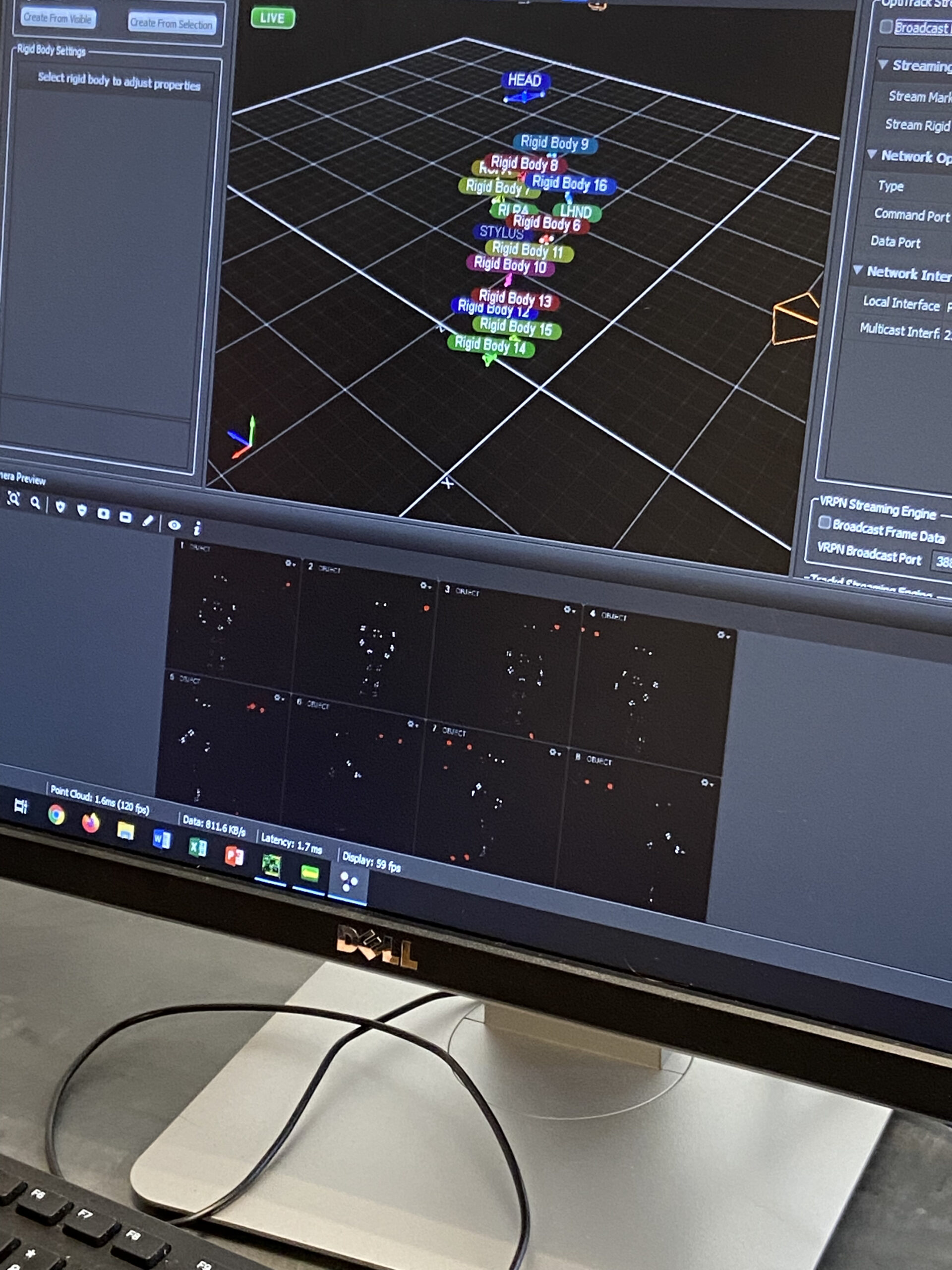
Multi-Systems Approach in Evaluation of Leg Exoskeleton
The purpose of this design project is to develop an exoskeleton brace that facilitates the sit to stand process. This process involves creating new motion capture markers that promote organic motion, and designing the an exoskeleton that does not limit the range of motion or degrees of freedom in the knee. In addition, the exoskeleton implements the use of an EMG trigged microcontroller to assist the motion of the leg. The exoskeleton brace is tested on patients to peform multi-system analysis using motion capture, force platform, wireless EMG, Anybody Technology, and 3D Rendering to determine the benefits the exoskeleton has on the knee joint. This is done by testing the exoskeleton by performing the sit-to-stand motion without no motorized assistance, sit-to-stand with constant velocity provided by a motorized seat, and sit-to-stand with constant acceleration also provided by a motorized seat. The control is found by repeating the trial without the use of the exoskeleton. These trials are activley monitored by the students using motion capture software along with musculoskeletal modeling software in order to develop a complete conclusion of the effects of this exoskeleton on the lower extremity.
