
This video contains proprietary information and cannot be shared publicly at this time.
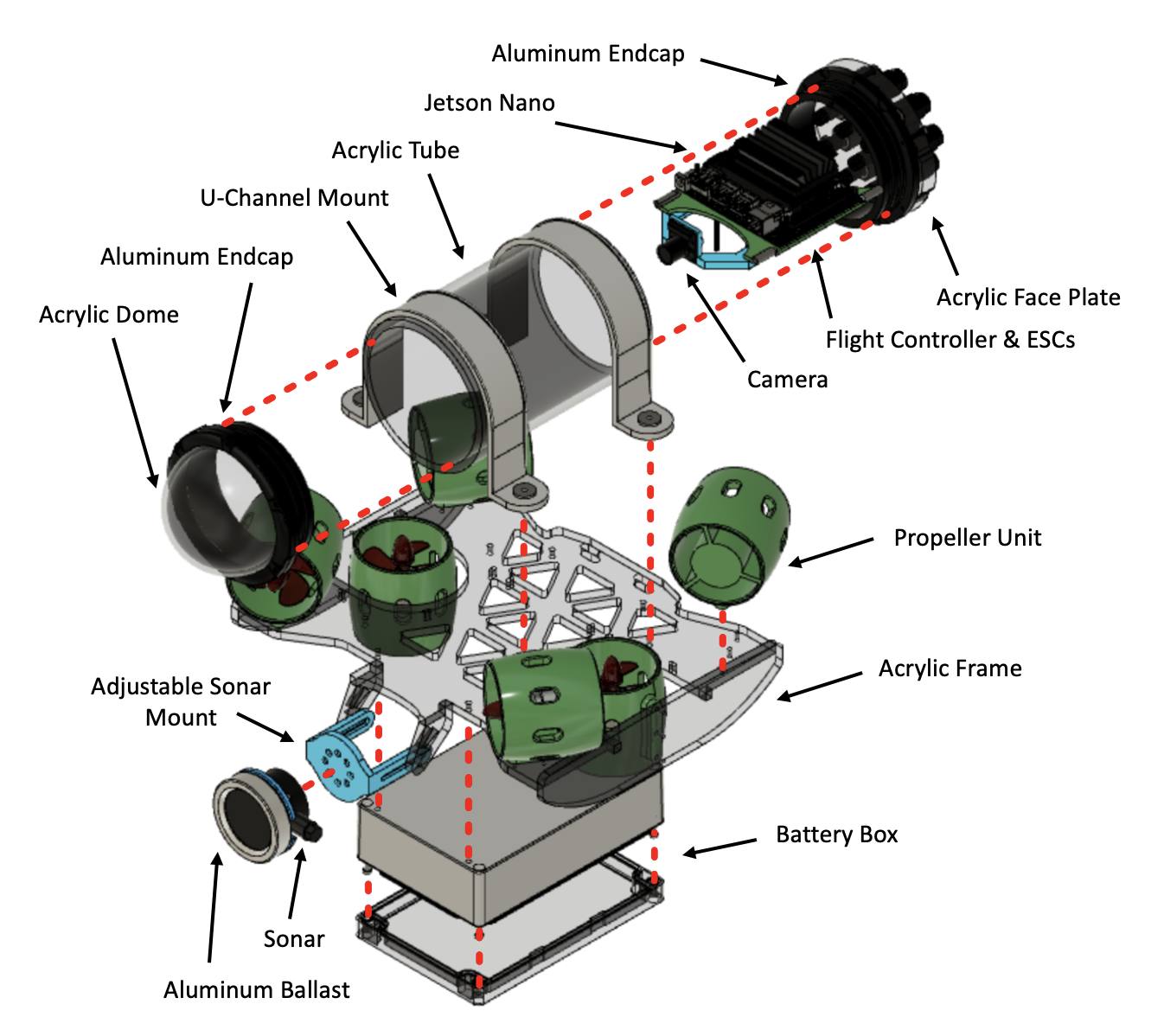
Figure 1
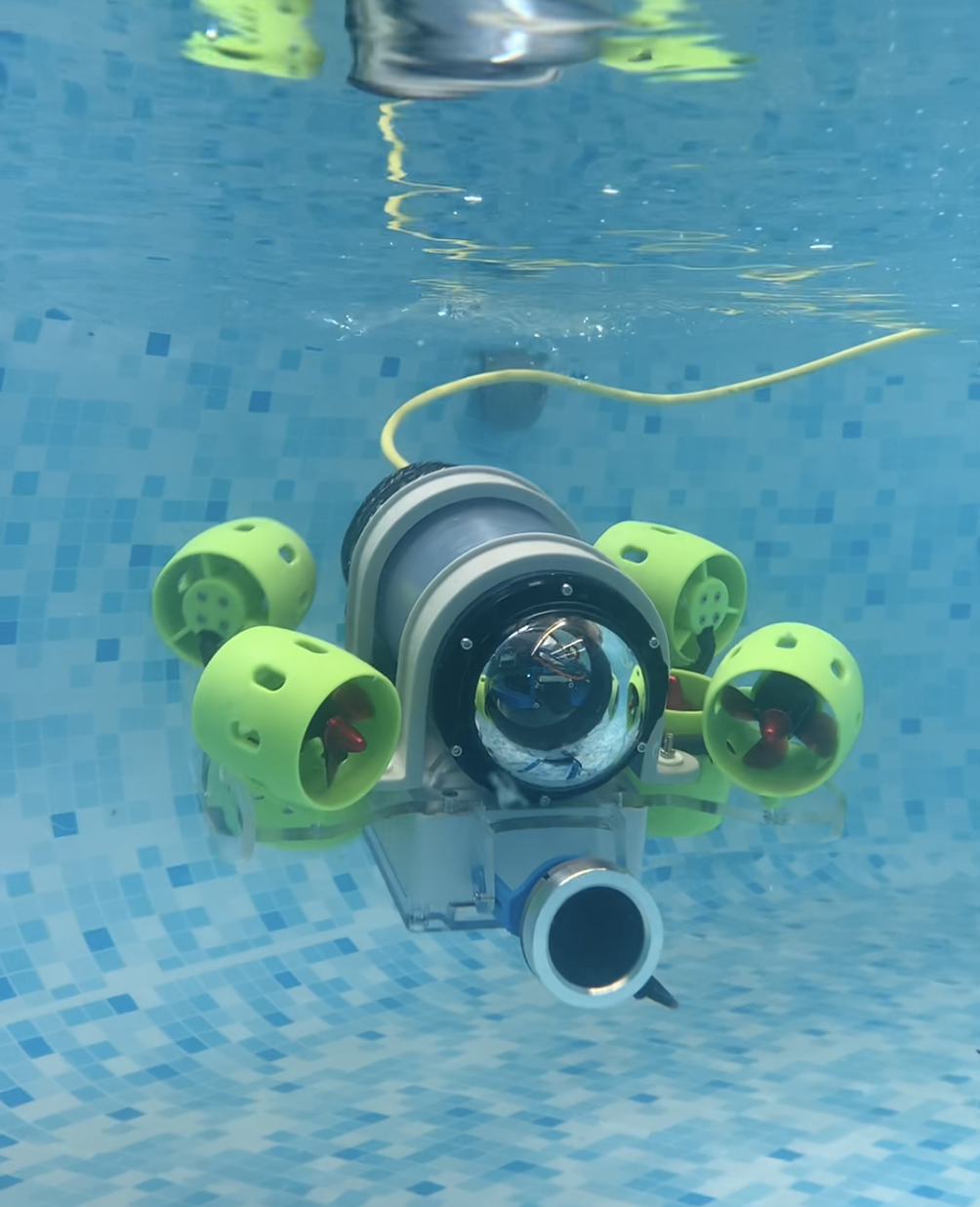
Figure 2
Team 60
Team Members |
Faculty Advisor |
Matthew O'Boyle |
George Lykotrafitis Sponsor UConn School of Engineering |
sponsored by
![]()
Mini Tetherless Autonomous Underwater Vehicle (AUV)
Underwater exploration has been a topic of increasing interest with experimentation being limited by the extreme environmental conditions and constraints. Correspondingly, unmanned underwater vehicle demand has also increased. Our team, sponsored by Professor Lykotrafitis and the UConn Mechanical Engineering Department, has been tasked with building an autonomous underwater vehicle (AUV) for which different AI and machine learning algorithms will be tested on. An initial prototype has been developed with five degrees of freedom, a ten-meter depth rating, and several hour battery life. A removable tether provides support for both manual and autonomous operation. Onboard sensors, including pressure, camera, and sonar, allow for stabilized control and object detection. Sensor telemetry is also available for data collection and analysis during all operational modes. The six brushless DC motors have PID control and are tuned for optimal stability in a test environment. Areas of interest for future development include autonomous path planning and obstacle avoidance, as well as group or swarm intelligence.
