
Figure 1

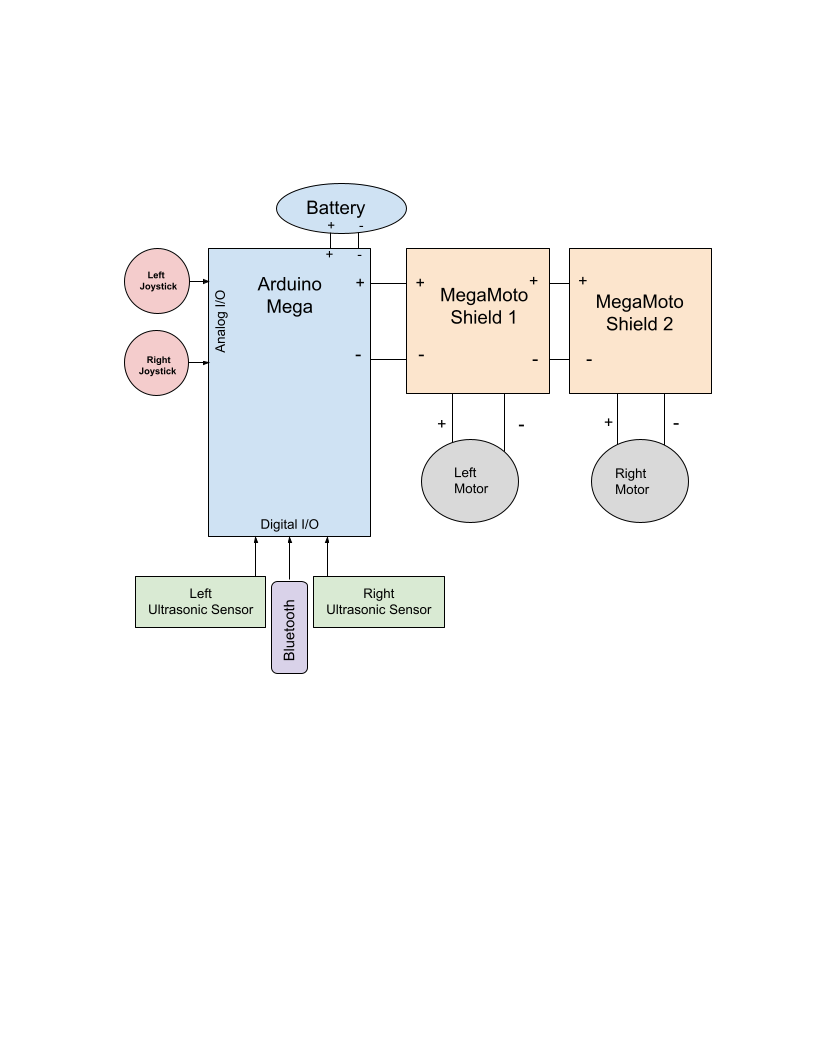
Figure 2
Team 11
Team Members |
Faculty Advisor |
Kyle Vallee |
Patrick Kumavor Sponsor UConn School of Engineering |
sponsored by
Sponsor Image Not Available
Joystick Operated Ride-On Device for Children with Cerebral Palsy
Children with cerebral palsy (CP) who have limited mobility are not able to fully benefit from traditional physical therapy methods that can help improve motor control, hand-eye coordination, strength, and their ability to interact with the environment. Traditional therapies are repetitive and unintuitive, often involving hours of repeated daily exercises. This is not engaging for CP patients which on its own reduces efficacy of the treatment. A powered-cart based therapy has the potential to be more engaging so that the patient is unaware they are undergoing physical therapy. Current powered-carts lack size adjustments to accommodate for the varying physical limitations of CP patients, control adjustments to ensure a safe experience, and data tracking to ensure the patient is progressing with their therapy. This project aims to develop a size-adjustable cart with remote safety features and data tracking for use in physical therapy of CP patients. This will be done by using an Arduino microcontroller to modify the existing cart shown in Figure 1 for accessibility, added safety, and comfortability. The result of this project will be a fun, engaging, dynamic, and accessible ride-on cart that can be used by physical therapists and families with children who have CP. The design consists of a repurposed Power Wheels ride-on cart, an Arduino Mega microcontroller, two MegaMoto Arduino shield motor drivers, a Bluetooth module, two ultrasonic sensors, and two configurable joysticks. The ride-on cart will be stripped of its existing microcontroller and joysticks and only the frame, 12V battery, and existing wheels will be utilized. The Arduino will take the place of the existing microcontroller to control all of the onboard signal processing and will be wired as shown in Figure 2. The MegaMoto drivers will take information from the Arduino and output a varying voltage to the DC motors based on the input from the joysticks.
